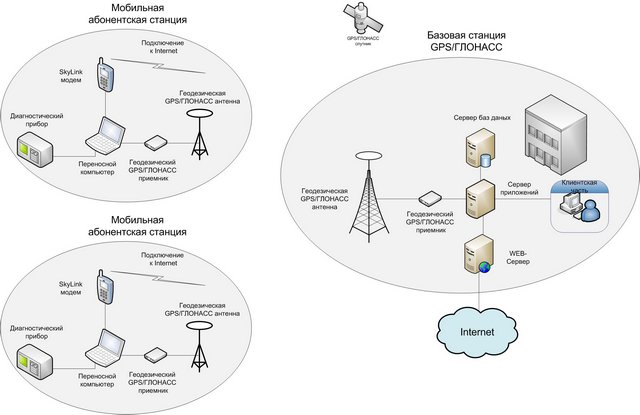
Базовая станция GPS/ГЛОНАСС
Система высокоточного позиционирования (СВП) предназначена для определения точного местоположения трубопроводов тепловых сетей и привязки дефектных зон к трубопроводам тепловых сетей ОАО «МОСКОВСКАЯ ТЕПЛОСЕТЕВАЯ КОМПАНИЯ». Основными целями создания система высокоточного позиционирования являются:
- составление высокоточных карт местоположения трубопроводов тепловых сетей;
- усовершенствование существующей системы диагностики трубопроводов, которая не предоставляет возможность комплексного информационно-аналитического обеспечения процессов, перечисленных выше;
- повышение эффективности исполнения процессов, перечисленных выше, путем сокращения непроизводительных операций, операций, выполняемых «вручную».
- повышение качества принятия управленческих решений за счет оперативности представления, полноты, достоверности и удобства форматов отображения информации.
GPS — одна из наиболее точных глобальных систем определения координат. Но её точность ухудшают ряд факторов, возникающих из-за влияния атмосферных явлений и солнечной радиации на параметры спутниковых сигналов, ухода часов спутников и т.п. Наиболее эффективным средством исключения ошибок является дифференциальный способ наблюдений — DGPS (Differential GPS). Его суть состоит в выполнении измерений двумя приемниками: один устанавливается в определяемой точке, а другой — в точке с известными координатами — базовой (контрольной) станции.
Поскольку расстояние от ИСЗ до приемников значительно больше расстояния между самими приемниками, то считают, что условия приема сигналов обоими приемниками практически одинаковы. А, следовательно, величины ошибок также будут близки. В режиме DGPS измеряют не абсолютные координаты первого приемника, а его положение относительно базового (вектор базы). Использование дифференциального режима позволяет практически полностью исключить влияние внешних факторов и довести точность кодовых измерений до десятков сантиметров, а фазовых — до единиц миллиметров
Существуют два метода дифференциальной коррекции координат, с помощью которых достигается точность позиционирования от 2-5 метров до нескольких миллиметров. Метод дифференциальной коррекции реального времени позволяет определить уточнённые непосредственно на месте измерения. Для этого мобильный GPS приёмник должен кроме сигналов от спутников принимать также корректирующие данные от базового GPS приёмника. Такие данные, как правило, передаются с помощью УКВ/FM радиостанций по протоколу RTCM или по каналам мобильной GSM связи. Такой метод хорош тем, что позволяет проводить точную навигацию непосредственно на месте определения координат. Его недостатками является снижения надёжности системы из-за наличия дополнительного оборудования и сужения области действия, по причине ограниченной дальности действия радиостанций. Метод постобработки основан на накоплении данных для последующей дифференциальной коррекции на базовой станции, которая состоит из приёмника с антенной, компьютера и соответствующего программного обеспечения. Мобильный GPS приёмник также накапливает данные в собственной памяти или в памяти мобильного компьютера в объёме, достаточном для последующей дифференциальной коррекции. По окончании работ данные базы и мобильного GPS приёмника (сырые данные измерений) совместно обрабатываются, при помощи специального программного обеспечения. Этот метод более надёжен, чем метод реального времени, на его область применения влияют только ограничения самого метода дифференциальной коррекции.
На территории московских тепловых сетей создана постоянно действующая GPS/ГЛОНАСС базовая станция, работающая по методу дифференциальной коррекции реального времени. Основными компонентами базовой станции является GPS приемник, установленный в фиксированной точке и программное обеспечение для управления таким приемником и регистрации данных на компьютере. Данные базовой GPS станции позволяют корректировать погрешности автономного определения координат подвижными приемниками при постобработке полевых данных. Корректный учет погрешностей осуществляется при выполнении следующих условий:
- Подвижный приемник накапливает данные в радиусе действия базовой станции.
- При этом наблюдается как минимум 4 или более общих спутников
- Накопление данных подвижным приемником происходит синхронно с базовой станцией.
Ядром существующей системы является двухчастотный двухсистемный GPS приемник Novatel DL-V3, работающий под управлением программного обеспечения и антенна GPS-701-GG. Приёмник круглосуточно записывает данные для постобработки, с интервалом в 5 секунд, в формате RTCM версии 3.0 (этот формат поддерживается программным обеспечением всех производителей), после чего он архивируется и выкладывается в сеть Интернет на WEB-сервер. При этом пользователь получает доступ к нему практически сразу же и может проводить дифференциальную коррекцию полевых данных. Сервер установлен в техническом помещении, расположенном на территории ОАО «МТК» в центре г. Москвы.

Антенна базовой станции GPS

Базовый GPS приемник
Абонент располагает GPS-701-GG антенной и GPS приемником FlexPack-V2, подключенным к мобильному компьютеру. Взаимодействие абонентов с информацией, размещенной на сервере, осуществляется через Интернет сайт системы (http://сайт.net), на котором можно ознакомиться с наличием и качеством данных, накопленных базовыми станциями сети. Для подключения к серверу дифференциальных поправок используется модем SkyLink, так же подключенный к мобильному компьютеру. Компьютер осуществляет обработку полученных с GPS приемника данных, получение дифференциальных поправок с сервера и постобработку в реальном времени с учетом дифференциальных поправок.

Антенна GPS передвижного абонента

Приемник GPS передвижного абонента
Связь WEB — сервера с Интернетом осуществляется посредством выделенных каналов связи, принадлежащих ОАО «МТК». Для связи мобильной абонентской станции с Интернетом применяется модем SkyLink AnyDATA ADU-300A.
К переносному компьютеру так же подключается диагностический прибор. Полученные рефлектораммы и их географические координаты, с учетом дифференциальных поправок, сохраняются на переносном компьютере, а в дальнейшем переносятся на внешнюю флэш-память.